So a few weeks ago I picked up an old Eufy robot hoover. It worked out of the box but as someone who has a strong dislike for Tuya products (this specific model was based on a Tuya platform) I had to remove the existing chip inside that gave the robot hoover its smart features.
This specific hoover, I picked up for around 30-40 quid on Facebook marketplace, it doesn’t have any LIDARR sensors, and literally is just a “dumb, bump into everything” type hoover. According to Amazon, it retails currently for £209.99, new. So managed to save a fortune with this one.
Before I go on though, I’d just like to give a shoutout to Rjevski on GitHub who provided a starting point for all of this to come together (https://github.com/Rjevski/esphome-eufy-robovac-g10-hybrid)
Parts:
- Eufy RoboVac (I’ve got a 30C, https://amzn.eu/d/7SMx5y1)
- ESP32 dev board (https://amzn.eu/d/7JQiL8Y)
- Some tools to help with disassembly (Phillips screwdriver, pliers)
- Optional – multi-meter
- Spare time and a bit of patience 😉
Now we’ve established what we need, lets get started.
First things first, we need to pull the hoover apart, I removed absolutely everything from the hoover (including the main logic board) so that I could clean up the insides as the one I had brought needed a good clean up, of course you don’t need to do this though. Below I’ve included a video that shows the disassembly process for the 30C. Follow this until around the 3:30 mark.
Now we’ve opened it up, we need to identify the components of the hoover. The big main board that you immediately see, is the brains of the device itself, it is not the part that actually makes it a smart device and connects up to the Tuya cloud. The part we want to replace seems to vary depending on model, have a hunt around and you should find a separate circuit board with what looks like an ESP chip onboard, the chip itself looks like the below:
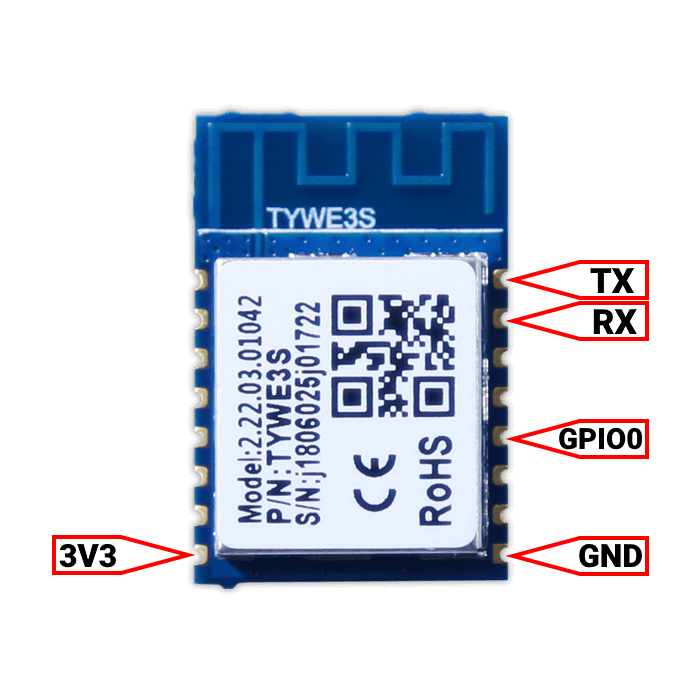
There is a connector with four cables going into it (red, green, blue, black), carefully remove the these cables out of the connector block, leaving with four separate cables.
Now we need to identify power cables. With my model I found that they weren’t using a standard colour scheme (red = +, black = -, blue/black = data). Instead they were slightly different, I would recommend getting the multi-meter out and probing each cable to identify what pair provides 3.3v. Use the GitHub repository above as a starting point.
Once we’ve identified the connectors that provide 3.3v power, hook-up your ESP dev board to your computer and flash ESPHome with a basic config. We can apply the rest of the settings using an OTA update.
This part took me a lot of trial and error to get right, so much so I had to leave it overnight and try again. Hook-up the remaining two cables to GPIO2 and GPIO4, we’ll add a tuya platform configuration to the ESPHome configuration. You need to make sure that you set the logger settings otherwise the connection will fail, and it will also help with figuring out the Tuya datapoints.
The time platform might be optional, but I’ve left it as it is because it works for me.
# Enable logging
logger:
baud_rate: 0
level: DEBUG
time:
- platform: sntp
id: sntp_time
# UART to talk to the application processor
uart:
id: vacuum_uart
rx_pin: GPIO2
tx_pin: GPIO4
baud_rate: 115200
debug: null
# the TuyaMCU object
tuya:
id: vacuum_tuya
uart_id: vacuum_uart
time_id: sntp_timeCompile and install the update config file (you can use OTA at this point as we’ve already installed a basic configuration), wait for the microcontroller to come back online and you should start seeing some logs. At this point you might need to swap GPIO2 and GPIO4 around if you are getting connection errors in the logs.
Once we’ve gotten to this point reassemble the device. Then we can start to create some sensors and buttons (ESPHome doesn’t currently have a vacuum platform, so we will create the actions, switches and sensors needed to create a template vacuum in Home Assistant).
This was a real pain, there isn’t any decent documentation out there at the moment, so below might be very specific to the 30C, although I can’t be sure.
| Datapoint ID | Datapoint Type | Usage | Valid Options |
| 104 | Number (int) | Battery | 0-100 |
| 15 | Select (enum) | Status | 0: Running 1: Idle 2: Sleeping 3: Charging 4: Charged 5: Docking |
| 102 | Select (enum) | Fan Speed | 0: BoostIQ 1: Standard 2: Max 3: Idle |
| 3 | Select (enum) | Move direction* | Unknown |
| 103 | Switch (int) | Locate | |
| 1 | Switch (int) | Unknown* | |
| 2 | Switch (int) | Unknown* | |
| 5 | Select (enum) | Run mode | 0: Auto 2: Spot cleaning 4: Quick clean |
| 101 | bool | Return to dock |
I’m sorry I can’t be anymore specific here, because there are some many variations, not all of this may be correct for your model, although if you read the output of the logs while using the remote to send some commands this may start working.
From here you can then start building the ESPHome config file, as a starting point, for the table above:
sensor:
- platform: wifi_signal
name: "WiFi Signal Sensor"
update_interval: 60s
- platform: uptime
name: Uptime Sensor
- platform: tuya
name: Battery
sensor_datapoint: 104
unit_of_measurement: "%"
icon: mdi:battery
device_class: battery
state_class: measurement
entity_category: config
select:
- platform: tuya
id: status_dp
enum_datapoint: 15
options:
0: Running
1: Idle
2: Sleeping
3: Charging
4: Charged
5: Docking
on_value: &publish_state_sensor
then:
- text_sensor.template.publish:
id: state_sensor
state: !lambda 'return id(status_dp).state;'
- platform: tuya
name: Fan speed
enum_datapoint: 102
entity_category: config
options:
0: BoostIQ
1: Standard
2: Max
3: Idle
- platform: tuya
name: Move Direction
enum_datapoint: 3
options:
0: Direction0
1: Direction1
2: Direction2
3: Direction3
text_sensor:
- platform: template
name: State
entity_category: config
id: state_sensor
switch:
- platform: tuya
name: Locate
icon: mdi:map-marker
entity_category: config
switch_datapoint: 103
- platform: tuya
name: Datapoint1
entity_category: config
switch_datapoint: 1
- platform: tuya
name: Datapoint2
entity_category: config
switch_datapoint: 2
button:
- platform: template
name: Start cleaning
entity_category: config
on_press:
- lambda: id(vacuum_tuya).force_set_enum_datapoint_value(5, 0);
- platform: template
name: Start spot cleaning
entity_category: config
on_press:
- lambda: id(vacuum_tuya).force_set_enum_datapoint_value(5, 2);
- platform: template
name: Start quick clean
entity_category: config
on_press:
- lambda: id(vacuum_tuya).force_set_enum_datapoint_value(5, 4);
- platform: template
id: return_to_dock
name: Return to dock
entity_category: config
on_press:
- lambda: id(vacuum_tuya).force_set_boolean_datapoint_value(101, true);
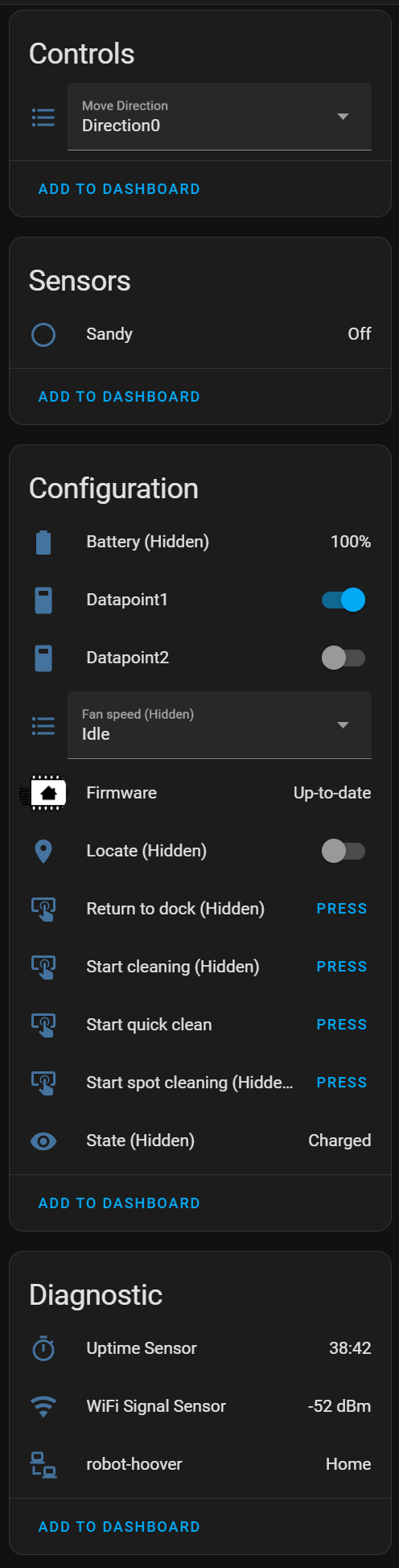
After installing the firmware, you should see some new entities popup in Home Assistant (ignore the sensor, I’m also using the ESP32 in my hoover to track an iBeacon, also lots of entities are hidden here just to tidy things up and keep them out of view)
Now we can create a template vacuum in Home Assistant, this will change depending on your options and setup, but for my setup I’ve used the following:
- platform: template
vacuums:
downstairs:
friendly_name: Robot Hoover
unique_id: downstairsrobothoover
value_template: |
{% set state_entity = "sensor.robot_hoover_state" %}
{% if is_state(state_entity, ["Charging", "Charged"]) %}
docked
{% elif is_state(state_entity, "Running") %}
cleaning
{% elif is_state(state_entity, ["Idle", "Sleeping"]) %}
idle
{% elif is_state(state_entity, "Docking") %}
returning
{% elif is_state(state_entity, "Paused") %}
paused
{% endif %}
battery_level_template: '{{ states("sensor.robot_hoover_battery") }}'
fan_speed_template: '{{ states("select.robot_hoover_fan_speed") }}'
availability_template: '{{ not is_state("sensor.robot_hoover_state", "unavailable") }}'
fan_speeds:
- Idle
- Standard
- Max
- BoostIQ
start:
- service: button.press
target:
entity_id: button.robot_hoover_start_cleaning
pause:
- service: switch.turn_off
target:
entity_id: switch.robot_hoover_datapoint2
return_to_base:
- service: button.press
target:
entity_id: button.robot_hoover_return_to_dock
clean_spot:
- service: button.press
target:
entity_id: button.robot_hoover_start_spot_cleaning
locate:
- service: switch.turn_on
target:
entity_id: switch.robot_hoover_locate
- delay: 1
- service: switch.turn_off
target:
entity_id: switch.robot_hoover_locate
set_fan_speed:
- service: select.select_option
target:
entity_id: select.robot_hoover_fan_speed
data:
option: "{{ fan_speed }}"